A new generation of soft robots is on the way, able to walk, climb and swim – but the real test is whether they could survive unaided in the wild. Jon Evans reports
The Turing test is a method for assessing whether a computer has reached human-like levels of intelligence. Proposed by British mathematician and computer pioneer Alan Turing in 1950, it involves a human evaluator having a written conversation with an unseen human and computer.
If the evaluator is unable to tell the human from the computer based on their responses, the computer has passed the Turing test and is deemed able to display human-like intelligence. With the recent rise of generative AI systems such as ChatGPT, we may now be on the cusp of passing this milestone.
Pioneering British mathematician and computer scientist Alan Turing, who proposed the eponymous test. Image: Public domain
So, it’s perhaps fitting that Michael Bartlett, Associate Professor in the department of mechanical engineering at Virginia Tech, US, may have come up with a new version of the Turing test – this time for soft robots. ‘I like this idea of dropping a soft robot in the middle of nowhere and seeing how long it can survive,’ he explains. If it can survive as long as a human, then it would have passed this new Turing test.
Soft robots have been an active field of research for several years. Whereas conventional robots are made entirely from rigid materials, soft robots are made, at least in part, from soft materials like gels and liquid metal. Soft robots are thus inherently more flexible and versatile, better able to squeeze into small spaces, cross rough terrain and interact with the soft contours of living organisms. As such, they have been envisaged for applications ranging from monitoring hazardous environments to delivering drugs inside the body.
Until now, researchers have generally focused on developing soft versions of specific robot components, including electrically conducting materials and actuators for inducing mechanical motion. But research is now beginning to progress to the next stage, which should eventually lead to soft robots that can pass the new version of the Turing test.
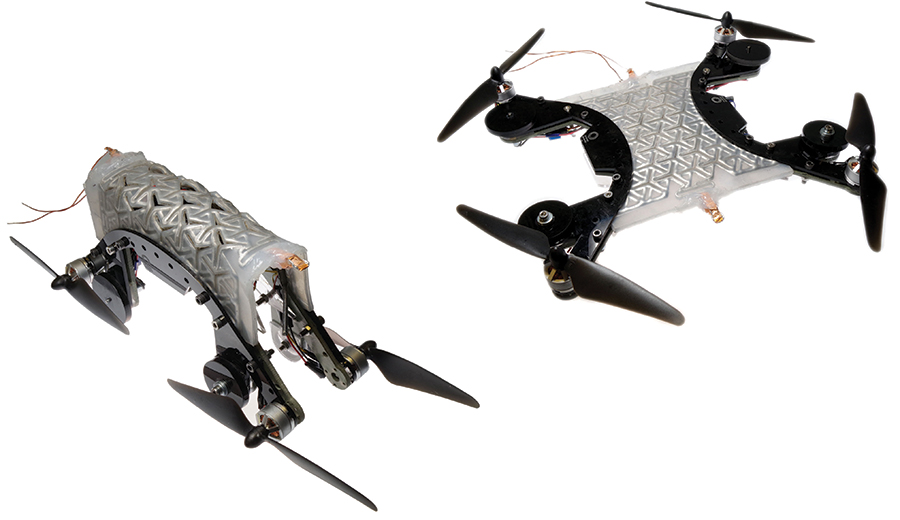
Michael Bartlett’s team’s soft robot can fly and walk.
‘Over the past 15 or 20 years, it has been a lot of development of materials or actuation mechanisms for different components required to make a soft robot,’ says Bartlett. ‘The challenge now is how do you bring all those together. In other words, how do you make it so a robot has all the different functionalities that you want it to have, such as sensing, actuation and processing of that sensing information.’
For example, electrically conducting materials and actuators are being brought together to produce soft robots that move. But to survive in the wild, a soft robot should ideally move in different ways, allowing it to traverse different types of terrain. Humans, for example, can walk, crawl, climb and swim. To pass this new Turing test, a soft robot would need to be able to do the same.
In a recent paper[1], Bartlett and his team describe developing soft robots that can walk, fly and swim. These robots are all based around a novel flexible material they created by sandwiching a low-melting-point alloy (LMPA) known as Field’s metal – an alloy of bismuth, indium and tin – between two sheets of a rubberlike elastomer. A regular pattern is carved into the two elastomer layers and this pattern is replicated in the layer of Field’s metal. Embedded in the bottom elastomer layer is a thin polymer mesh coated in liquid metal that heats up when an electric current is applied, forming a heating layer.
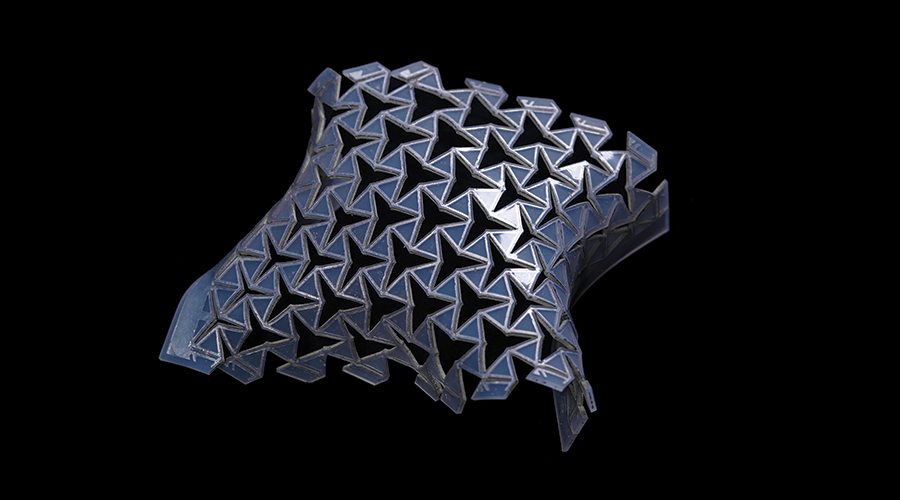
The flexible material developed by Michael Bartlett and his team.
As an LMPA, Field’s metal melts at 62°C, which means the Field’s metal layer can be melted by simply applying an electric current to the heater layer. At room temperature, the Field’s metal layer is solid, but thin enough that it can easily be deformed into a new three-dimensional shape and then hold that shape, just like bending a paperclip. This deformation process is aided by the pattern of cuts in the elastomer sheets. To revert the material back to a flat sheet, the Field’s metal layer just needs to be melted with the heating layer, causing it to lose its new shape.
As an initial demonstration, Bartlett and his team developed a version with a pattern of repeating triangles cut into it and placed it over an inflatable membrane, such that inflating the membrane caused the flat material to change shape, forming a raised mound with two peaks. The material was then able to hold that shape when the membrane was deflated and was strong enough to support a 240g weight placed on it. But when the Field’s metal was melted by the heating layer, the material reverted to its original flat shape.
To use this material for making mobile soft robots, Bartlett and his team had to combine it with rigid materials; just as many living organisms, especially those that live on land, combine soft tissue with a hard skeleton. ‘In some conditions, you actually need rigid parts to support the soft materials,’ Bartlett says.
To produce a soft robot that could walk and then fly, the team attached plastic propellers to the four corners of an hourglass-shaped sheet of their material. When they bent the material over so the propellers were oriented vertically, the robot would walk when the propellers turned. When they melted the Field’s metal, the material would flatten so that the propellers were now oriented horizontally, allowing the robot to fly when the propellers turned. Using a different design that employed the material for buoyancy, they were also able to produce a soft robot that could swim.
Walking and swimming

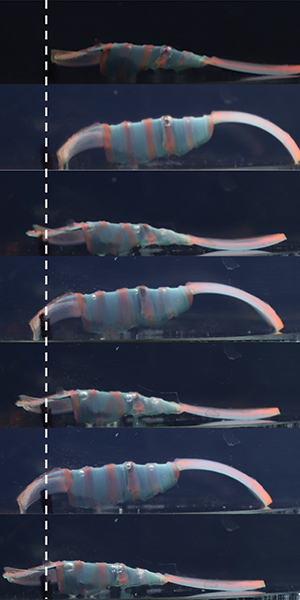
Showing how the soft robot developed by Carmel Majidi and his team can switch from swimming to walking.
A similar approach was taken by a team at Carnegie Mellon University in Pittsburgh, US, led by Carmel Majidi, to produce a soft robot that could both walk and swim[2]. ‘Matching how animals transition from walking to swimming to crawling to jumping is a grand challenge for bio-inspired and soft robotics,’ says Majidi.
The centrepiece of their robot is a soft material comprising two rectangular, 3D-printed pieces of elastomer stuck together with a prestretched membrane sandwiched between them, such that the membrane pulls the elastomer over to form a curved shape. Two sets of coils made of a shape-memory alloy (SMA), which changes shape when heated, are embedded into the elastomer.
Heating the outer SMA coil, by applying an electric current, causes it to contract, while the inner coil stays the same. This causes the elastomer to suddenly flip, so that it now curves the other way, again held in place by the pre-stretched membrane. In this new configuration, the formerly outer SMA coil is now the inner one, and vice versa. When an electric current is now applied to the new outer SMA coil, it causes the elastomer to flip back over so it curves the original way. In this way, the elastomer can be repeatedly flipped over to curve in a different direction.
To create a soft robot, Majidi and his team attached a C-shaped connector to each side of the elastomer. Both these connectors had two strips of SMA attached to each end, which would bend on application of an electric current. When the elastomer curves in one direction, these SMA strips are oriented horizontally, causing them to act like flippers and thus allowing the robot to swim. But if the elastomer piece is flipped to curve in the opposite direction, the curved SMA strips are now oriented vertically, causing them to act like legs and allowing the robot to walk.
The problem with both these robots is that, currently, they need to be tethered to a power supply or a pump and controlled by a human operator. To survive in the wild, soft robots would need to be untethered and operate autonomously, deciding for themselves whether they need to walk, fly or swim. This is what Bartlett and his team are now focusing on.
‘The next steps are about making it reversible, rapid and doing that all in a system that can exist by itself, not relying on other external components,’ he says. ‘That’s definitely the future of these things – rapid transformations that are untethered, that are really adaptable to whatever conditions they want to exist in.’
Magnetic movement
Left: The Gracias team's robot can crawl in response to temperature changes.
One way to remove the tether is to induce movement with a magnetic field. For example, a team led by Metin Sitti at the Max Planck Institute for Intelligent Systems in Stuttgart, Germany, has developed soft robots that can climb under the influence of a magnetic field[3]. These soft robots comprise a small strip of silicone rubber, just 3.7mm long and 1.5mm wide, embedded with magnetic nanoparticles. Two cylindrical plastic footpads are attached to each end of this rubber strip.
Sitti and his team developed two versions of these footpads: one for operating in dry environments and one for operating in damp environments. The dry footpad is covered in mushroom-shaped protrusions that act as tiny suckers for sticking the footpad to dry surfaces, while the damp footpad is covered in tiny spikes for pinning the footpad to soft, moist surfaces. The rubber strip is designed to bend and flip when exposed to a magnetic field, with enough force to peel the footpads away from the surface they are stuck to. In this way, the soft robot can climb up vertical surfaces by repeatedly flipping itself over while its footpads stick to the surface.
One promising application for these soft robots would be delivering drugs to specific locations in the body, especially as the process of moving them with a magnetic field would work well in an enclosed space. To this end, Sitti and his team attached chitosan-based bioadhesives to the spikes to help the footpads stick to mucus-covered tissue surfaces. They showed that these soft robots could climb up various soft and wet surfaces, including small intestine tissue from a pig.
The magnetic field still needs to be applied by humans, but a soft robot developed by a team led by David Gracias at Johns Hopkins University in Baltimore, US, can operate both untethered and autonomously, powered by nothing more than temperature changes[4]. This soft robot is made of strips of a polymer bilayer, comprising a top layer of a thermally responsive polymer and a bottom layer of a normal polymer, connected by linker segments. The thermally responsive polymer swells as the environmental temperature cools from 60°C to 25°C, whereas the conventional polymer stays the same size. As a consequence, the bilayer bends upwards as the temperature drops.
By connecting two bilayer segments of different lengths with a linker segment, Gracias and his team were able to produce a soft robot that could move in water by simply varying the temperature.
As the bilayers bend, they pull the whole soft robot forward, before flattening again when the temperature rises. In this way, as the temperature varies, the soft robot gradually creeps forward.
‘It seems very simplistic, but this is an object moving without batteries, without wiring, without an external power supply of any kind – just on the swelling and shrinking of gel,’ says Gracias.
Self-repair

Carmel Majidi’s team’s soft robot snail with self-healing ability.
The other attribute a soft robot will need to survive in the wild is self-healing. ‘Inevitably, if you deploy something into the wild it’s going to get damaged,’ says Bartlett. ‘How do you make it so that when something bad happens, the robot can repair itself so it continues going forward?’
Majidi and his team recently developed an electrically conducting, self-healing material that comprises a hydrogel embedded with silver micro flakes and microscale droplets of a gallium-based liquid metal alloy[5]. To demonstrate its properties, they fabricated a snail-shaped soft robot made of silicone with a batterypowered motor, using the self-healing material to connect the battery to the motor.
As the snail was moving, the researchers partially snipped the connection between the battery and the motor, causing the soft robot to slow down. But when the two snipped sections were pressed together, they fused again via the formation of hydrogen bonds, while the liquid metal droplets flowed to reestablish the electrical connection, causing the snail to regain its former speed.
There’s still a long way to go before soft robots will be able to pass this new version of the Turing test, but then it took over 70 years to pass the first version.
References